Modular Architecture
The Co-Sim is a highly modular matlab-based simulaton framework. It has been designed here in Networked Systems Lab and is used specifically for vehicular active safety system analysis.
- Mobility and Driving Module
- Communication Network
- Cooperative Collision Avoidance System
- Driver Reaction Model
These components are interconnected and hence provide a comprehensive simulation environment. The simulator comes with an easy-to-use Graphical User Interface that allows the user to effortlessly customize and build a desired environment. Its modular design makes it easy to implement new algorithms and to integrate more components. Our researchers use this framework to study and analyze the effect of entailed components on performance of the vehicle safety systems in a large scale traffic scenario. The integrated driver model also allows us to study different driver behaviors and reactions to a safety warning and to investigate its impact on overall traffic conditions.
Modules
Transportation Network
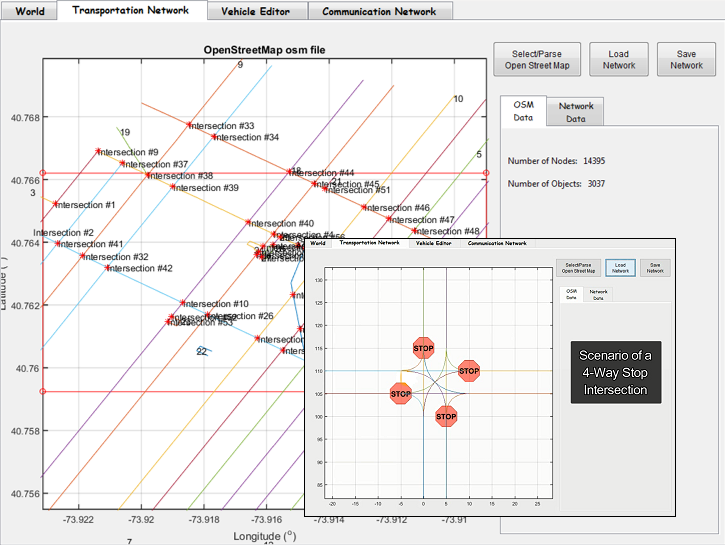
The Transportation Network Editor provides easy to use tools for building and editing any desired road traffic network. It can also import a map, directly from OpenstreetMap.
Vehicle, Mobility and Communication
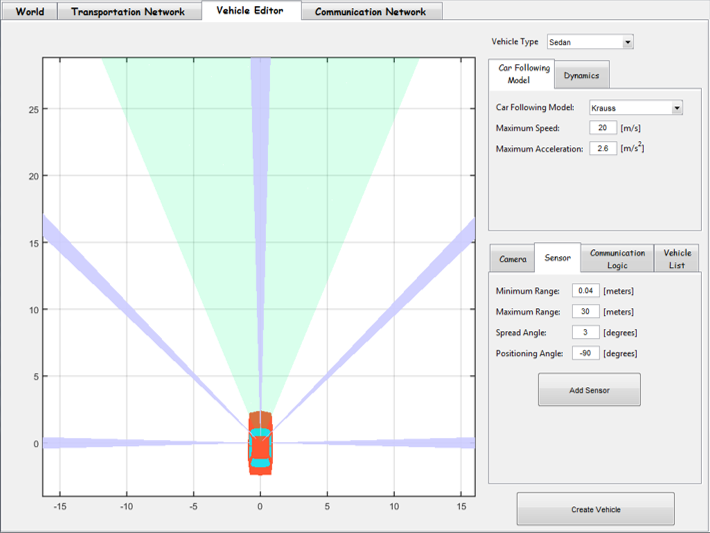
The Vehicle Editor lets users create and customize as many different vehicles as they desire. It allows you to set the core
parameters of components involvled in driving and simulating of vehiclular network.
The Vehicle-to-Vehicle communication is represented by a communication logic and a communication network model. It
can be represented by a simple mathematical model as a function of packet-error rate or can be carried out through
a look-up table.
Safety Systems and Driver Model
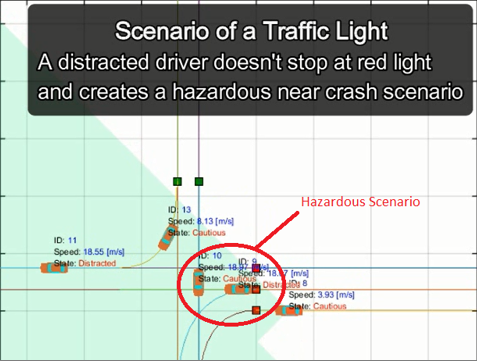
Other main components include driver's vision, on-board sensors, and communication devices. The Co-Sim uses an innovative
approach to simulate vehicle movements based on the data collected from these sources, as well as the information perceived
by the driver through his/her field-of-vision. The Co-Sim uses Car-Following Models to simulate vehicles movements.
Once safety systems detect a hazard, the mobility model automatically switches to a vehicle dynamics model which allows
for a more accurate and detailed analysis of the emergency situation.